🗓️ The 1st Workshop of the AI4HyDrop project will take place on 7 February 2024 from 9:30 to 12 noon (virtual meeting).

During the workshop, you will have the chance to learn firsthand about the cutting-edge technologies, methodologies, and innovations that we are developing within the AI4HyDrop project. Furthermore, it will serve as a platform to engage in meaningful discussions, share experiences, and explore potential collaborations with fellow stakeholders. We believe that your presence and active participation will greatly enrich the workshop and contribute towards the project’s success. Your expertise and insights are highly valued, and we look forward to hearing your perspectives during the interactive sessions. This workshop presents an opportunity for us to gather and exchange valuable insights on the project’s advancements, challenges, and future prospects.
The workshop will have a plenary session and three parallel tracks about design of airspace structure, drone detection, and automatization of drone operations using Artificial Intelligence:
AGENDA
Each track will be held twice to allow people interested in more than one topic to attend.
| 09:30 |
Plenary session. Introduction to An AI-based Holistic Dynamic Framework for a safe Drone’s Operations in restricted and urban areas. |
|
|
| 10:00 |
Session 1: How could the design of airspace and its structure accommodate UAS operations? |
| Session 2: How to Detect and Identify Drones in restricted areas? |
| Session 3: How to support the automation of Flight Planning? Is AI the next thing? |
|
|
| 10:45 |
Session 1: How could the design of airspace and its structure accommodate UAS operations? |
| Session 2: How to Detect and Identify Drones in restricted areas? |
| Session 3: How to support the automation of Flight Planning? Is AI the next thing? |
|
|
| 11:30 |
Sharing of conclusions and discussion on next steps |
|
|
Session 1 – Design of airspace structure.
Chair: Yannick Seprey (Sopra Steria) / Nurullah Gültekin (DHMI – General Directorate of State Airports Authority)
Airspace design over urban areas, including close to ATM controlled airspaces, will be key to ensure safety of all kind of operations (manned and unmanned/crewed or uncrewed), of people on ground embedding social considerations; That will also provide the proper environment and conditions for airspace users to perform their missions as expected.
This session aims at challenging some ideas AI4HyDrop already has on the subject, collecting ideas from the audience and at answering questions we have on the way to build an airspace design conceptual framework.
Session 2 – How to Detect and Identify Drones in restricted areas?
Session chair: Enrique Puertas (European University in Madrid) / Fabio Suim Chagas (University of South-Eastern Norway)
In this session we will discuss the use of Artificial Intelligence to detect drones flying in no-fly areas within urban areas, discussing the constraints such as the use of low-cost sensors, where to place those sensors and how to train the algorithms with the reduction of false positives in mind. Some of the aspects we want to clarify in this session are what kind of signals and sensors can be suitable for detecting a drone, and which of them can be realistically used in cities and urban environments.
The session will also discuss the different mechanisms to identify the drone operator flying in a restricted area, and how to communicate with him to correct the situation.
Session 3 – How to support the automation of Flight Planning? Is AI the next thing?
Session chair: Miguel A. Fas-Millan (DLR – German Aerospace) / Emre Koyuncu (ITU – Istanbul Technical University)
In this session, we delve into a crucial aspect of AI4HyDrop – the automation of the flight plan approval process. This intricate process entails the management of a vast array of information, including environmental data, policies, priorities, and traffic density balance. We value your insights on the optimal level of transparency, independence, and safety when distributing this information to airspace users.
Furthermore, during this session, we aim to tackle several key aspects:
- Defining and structuring pre-tactical flight intentions and plans.
- Determining the mandated format for flight plans.
- Identifying the information necessary for an automated AI system to assess flight plans in real-time, considering risks, safety, and fairness.
Our goal is to enable efficient and secure U-space management by automating the approval and rejection of flight plans, and your input in shaping these processes is highly valued.
We invite you to participate in this exclusive event. Join us to explore the latest advancements in the utilization of AI for future drone operations at scale in urban and restricted areas.
🔗 To secure your spot, we kindly request you to register promptly through the Eventbrite platform by following the registration link provided below.
🎟️ Registration Link: https://www.eventbrite.es/e/ai4hydrop-workshop-tickets-798303476187






 On January 7th 2024, during the first AI4HyDrop Workshop, we invited the participants to contribute with their suggestions for U-plan data and format. We will listen to your feedback along the whole project (around the end on 2025), to reflect your ideas in a final report.
On January 7th 2024, during the first AI4HyDrop Workshop, we invited the participants to contribute with their suggestions for U-plan data and format. We will listen to your feedback along the whole project (around the end on 2025), to reflect your ideas in a final report.
 However, during the validations, the final users reported different needs that had to be reflected also in the flight plan, like the possibility to define geo-cages, to fly at a certain altitude, or to define segregated volumes in the origin or destination for the fixed wings to execute their climb/descend manoeuvres. There were also technical limitations and the desire to specify preferences to be allowed if possible.
However, during the validations, the final users reported different needs that had to be reflected also in the flight plan, like the possibility to define geo-cages, to fly at a certain altitude, or to define segregated volumes in the origin or destination for the fixed wings to execute their climb/descend manoeuvres. There were also technical limitations and the desire to specify preferences to be allowed if possible.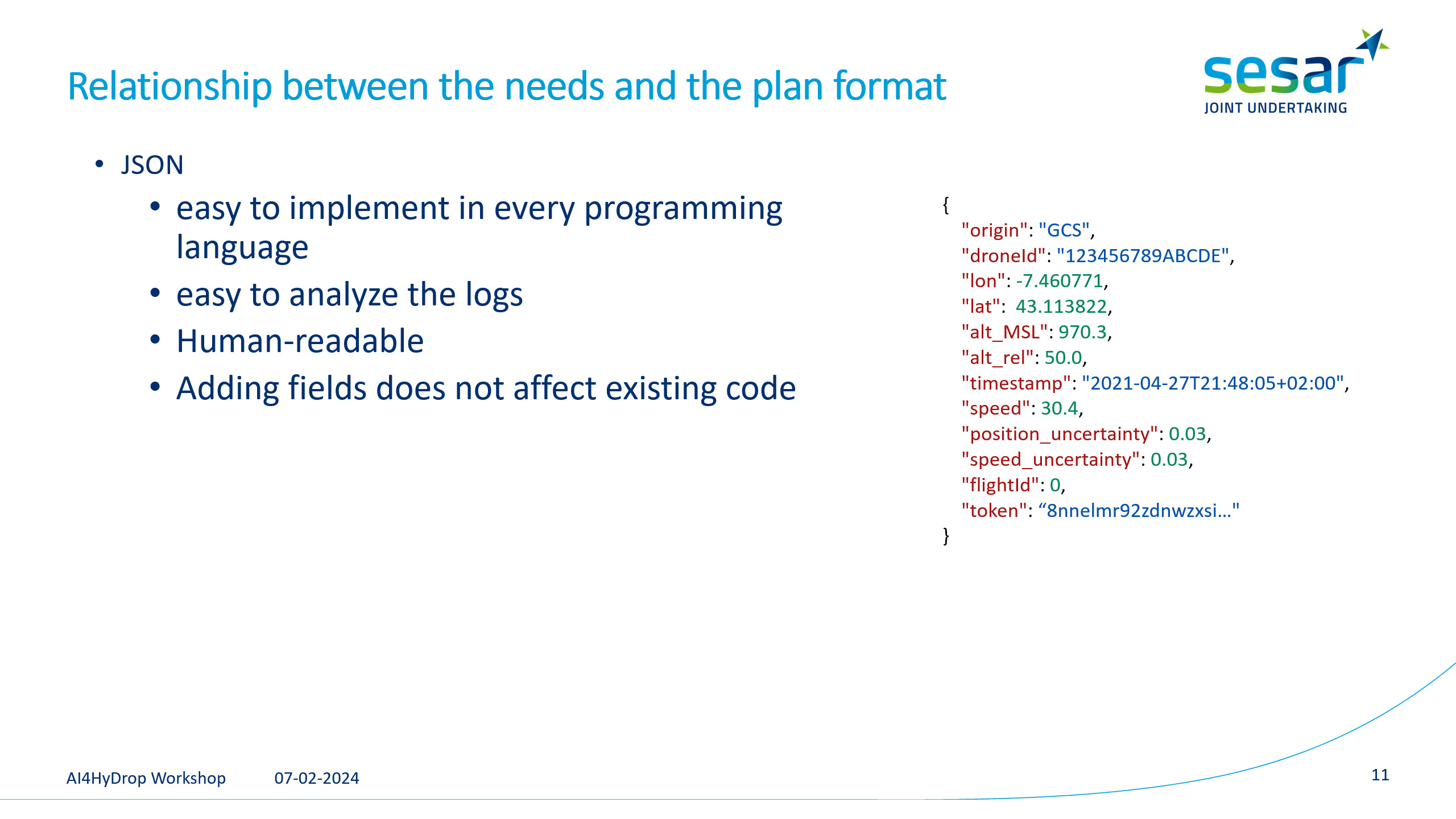 In Labyrinth, it was selected JSON as the format for the messages to communicate with the U-space.
In Labyrinth, it was selected JSON as the format for the messages to communicate with the U-space. Same as in the project DACUS, Labyrinth selected the GeoJSON standard to represent the flight plans. It allows to describe the trajectories as a sequence of points and areas or volumes.
Same as in the project DACUS, Labyrinth selected the GeoJSON standard to represent the flight plans. It allows to describe the trajectories as a sequence of points and areas or volumes.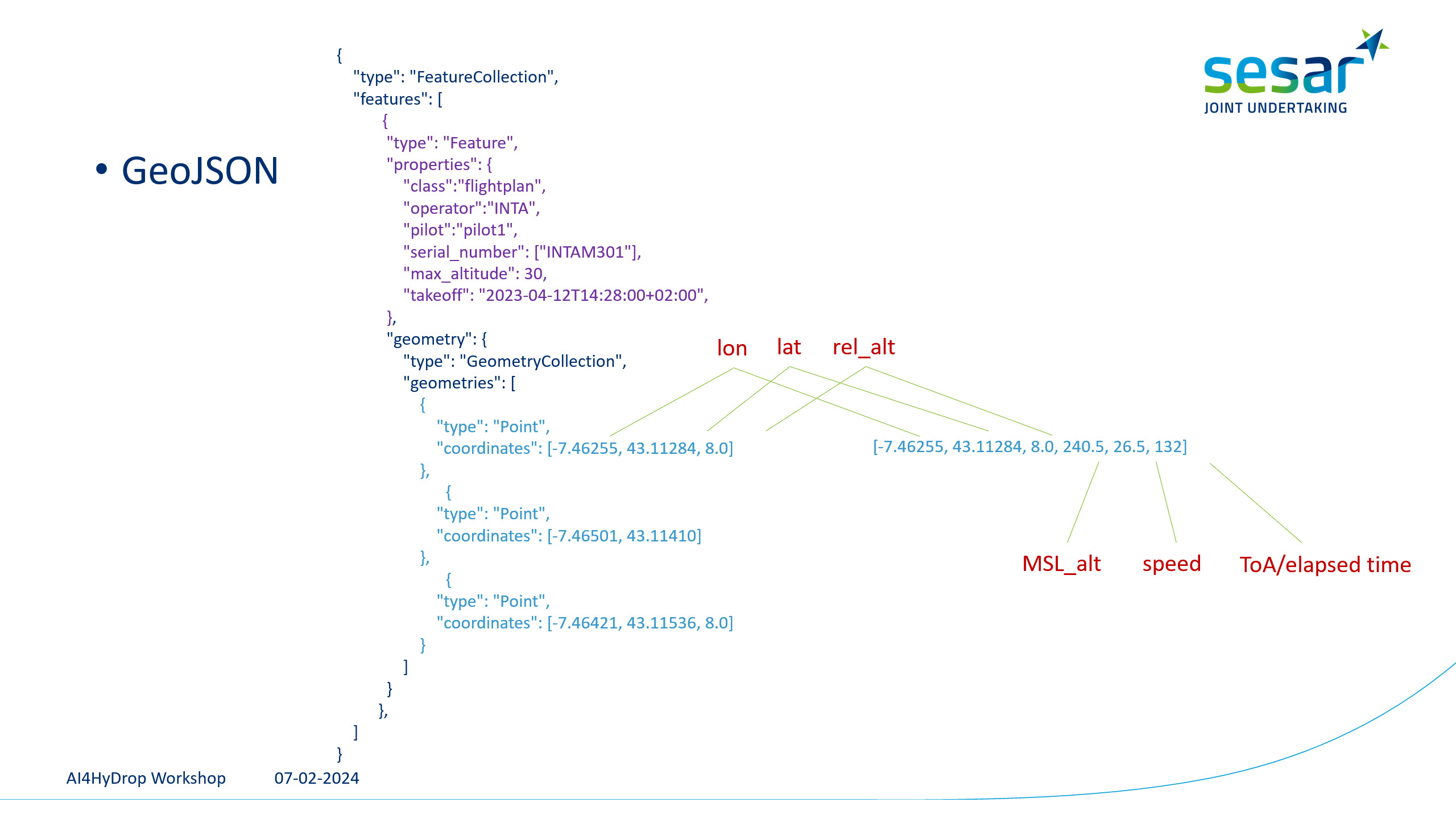 In GeoJSON, a large number or elements can be added to the coordinates, which allows to specify information and constraints associated to the waypoints.
In GeoJSON, a large number or elements can be added to the coordinates, which allows to specify information and constraints associated to the waypoints.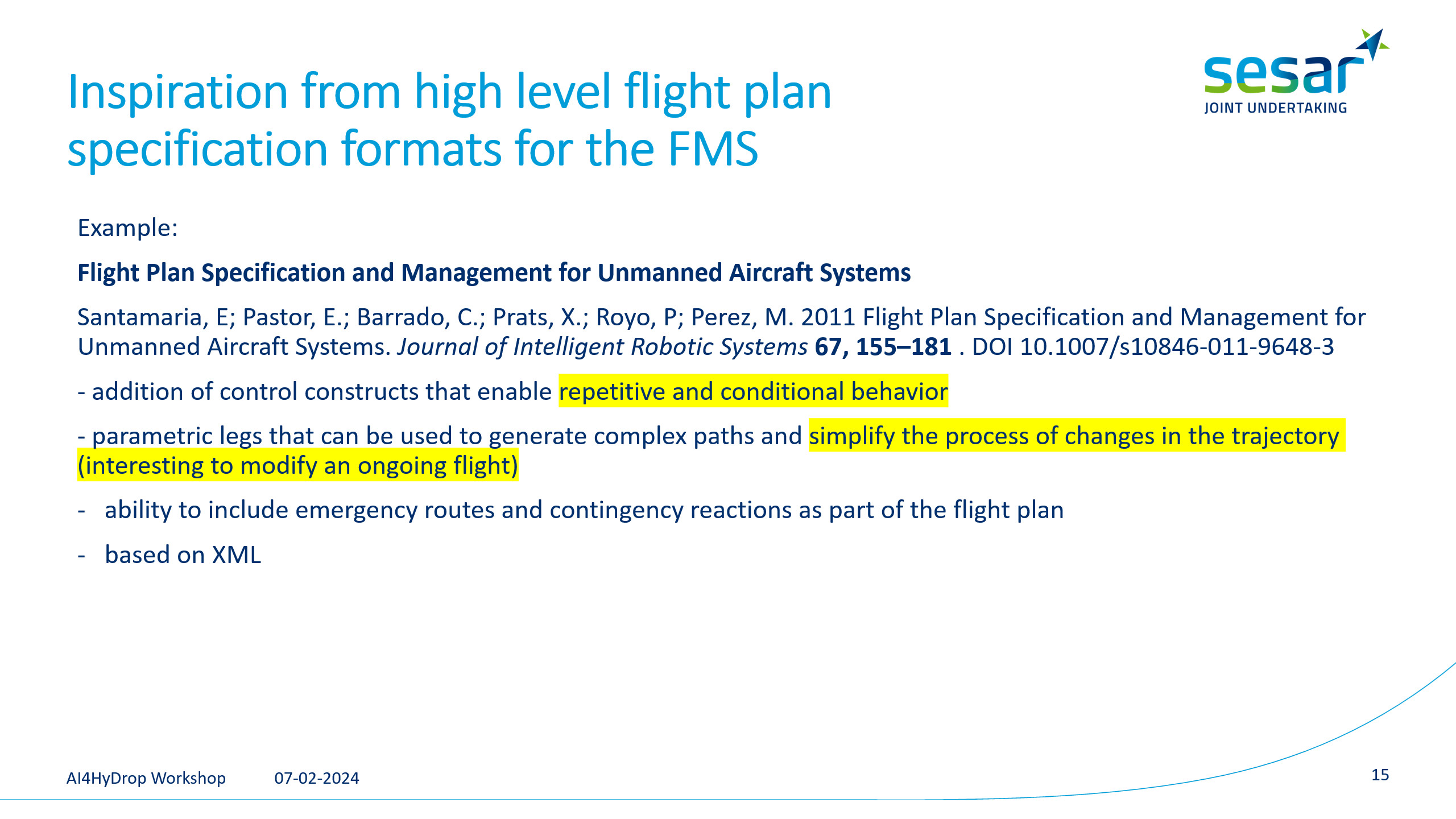 However, inspired by proposals that suggest high level flight plan specifications, we could consider the possibility of using plans with the capability to reflect complex parts like conditions or loops.
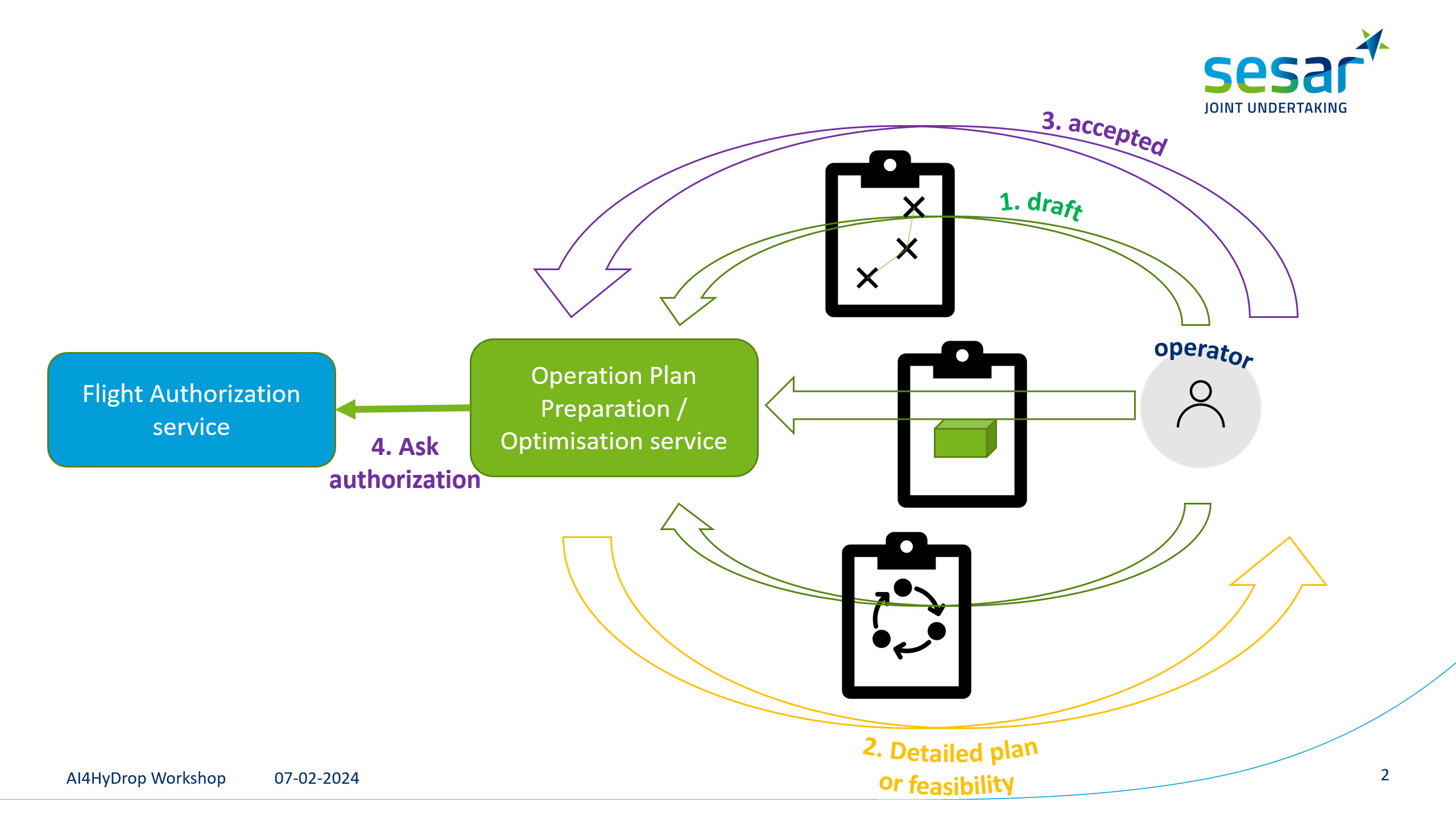
However, inspired by proposals that suggest high level flight plan specifications, we could consider the possibility of using plans with the capability to reflect complex parts like conditions or loops.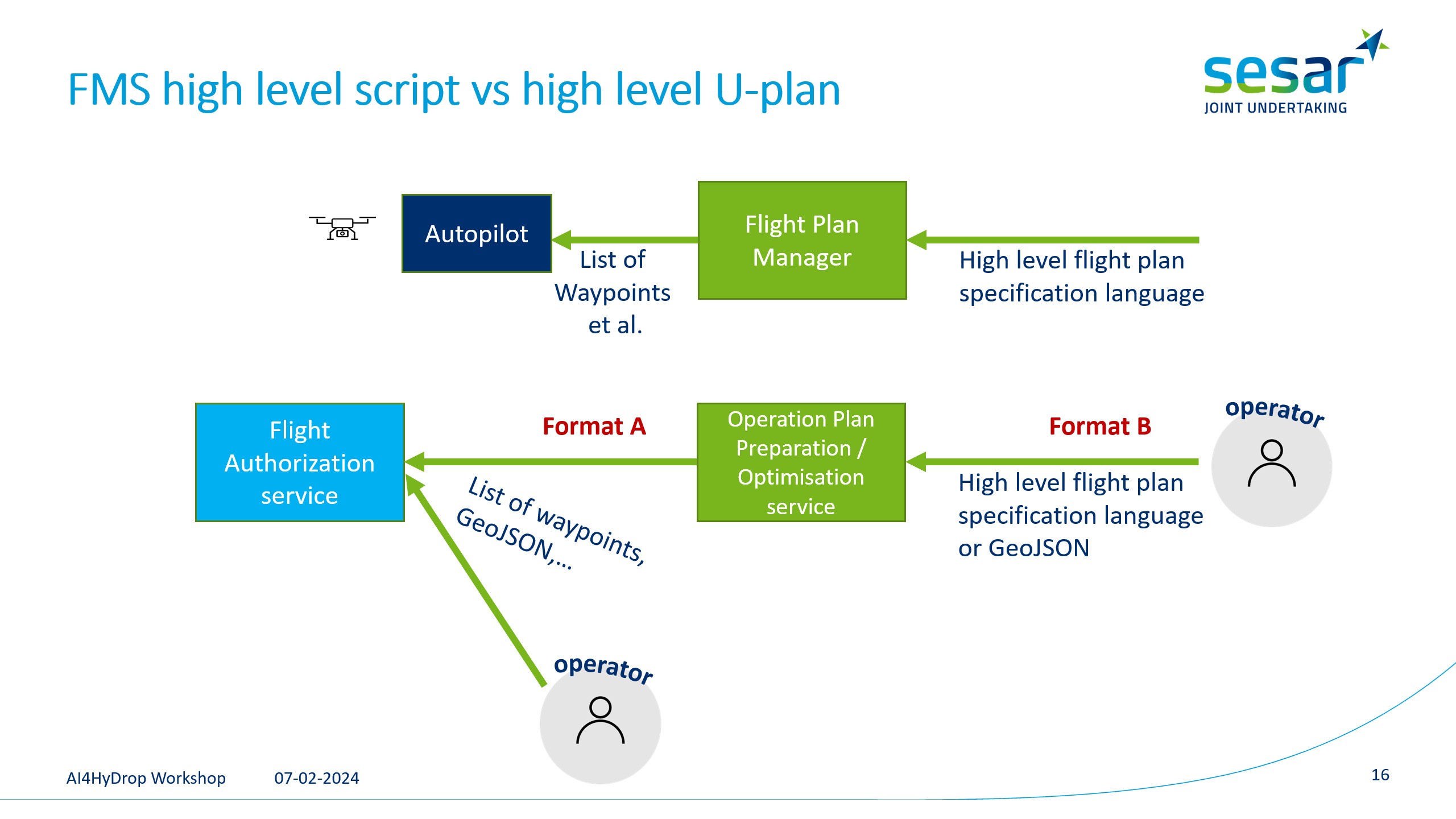 The article in the slide was suggesting a high-level format that would be translated into a list of waypoints to be uploaded to the drone. In our case, a similar high-level specification could be sent to the Operation Plan Preparation/Optimisation service, which would convert it to a more low-level format to be processed by the Flight Authorization service. In the event that the Operation Plan Preparation/Optimisation service is not available, the option to directly send a simpler format should be possible.
The article in the slide was suggesting a high-level format that would be translated into a list of waypoints to be uploaded to the drone. In our case, a similar high-level specification could be sent to the Operation Plan Preparation/Optimisation service, which would convert it to a more low-level format to be processed by the Flight Authorization service. In the event that the Operation Plan Preparation/Optimisation service is not available, the option to directly send a simpler format should be possible.











